
The Project
Underwater archaeological sites are an important part of the Underwater Cultural Heritage of Greece. Modern technologies and innovative applications strengthen the marine scientific research and may significantly contribute to the preservation, promotion and protection of underwater monuments.
According to the Ephorate of Underwater Antiquities, there have been documented approximately 250 ancient shipwrecks and 50 submerged settlements and port facilities in Greek waters, while there are several hundred ancient shipwrecks that have not yet been documented. However, to date underwater archaeological field research has focused mainly on ancient monuments and rarely on modern wrecks of warships, merchant ships and aircrafts. The Underwater Cultural Heritage of Greece is therefore an unexplored field.
The support of underwater archaeological research is imperative for a country with huge marine area like Greece, especially when the Greek archipelago has been a diachronic trade and cultural crossroad ever since the ancient times until today.
The use of robotics in marine scientific research enhances safety, efficiency and accuracy in field work.
Project Scope
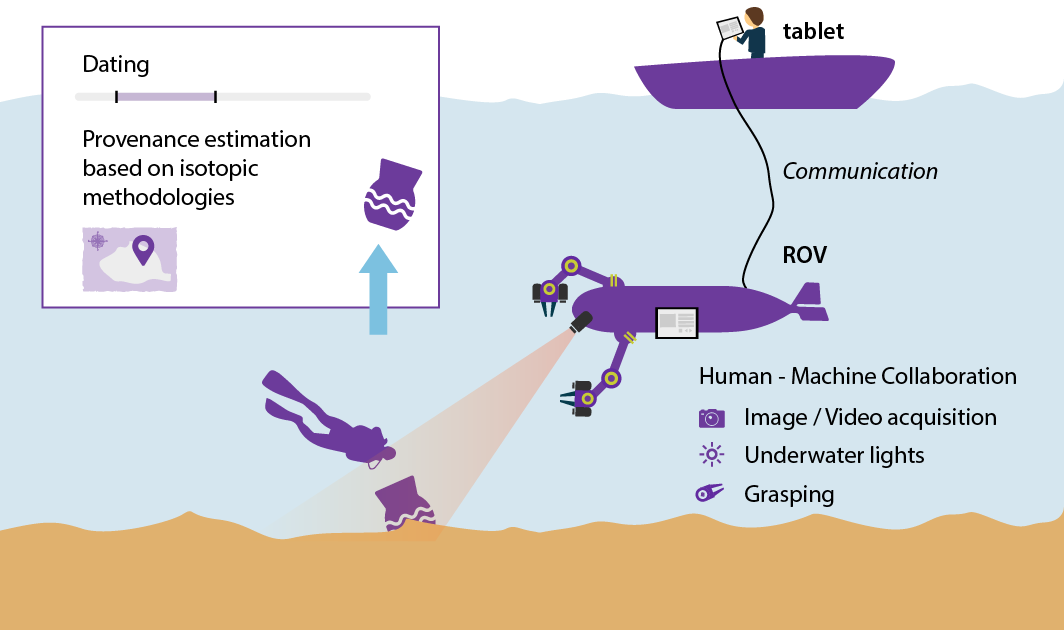
The u-archaeoRoV project is developing an innovative semi-automatic RoV to assist in the underwater archaeological field research, with the following key features:
- Haptic robotic arms, which can simulate the movements of a scuba diver and clean an artifact, use the airlift and raise the finds to the surface, with or without the help of the scuba diver. The haptic arms allow the operator of the RoV to sensor and have control over both the movement of the robotic arms and the force applied when holding an artifact.
- Floodlights and stereoscopic cameras placed on the robotic arms of the RoV for taking photos and videos and creating a photomosaic and a photogrammetry model for 3D reconstruction of the artifacts. In addition, automatic placement of the North and scale indicator on the photos and the creation of trajectories for the cameras.
- Interface, so that the operator can fully view and control the movements of the RoV, the robotic arms, the cameras and the floodlights. Also, equipment for the interaction and communication between the operator of the ROV and the scuba diver.
- Development of isotopic technology for material identification analysis, after the artifacts have been raised to the surface.
A graphical representation of the architecture of the u-archaeoRoV system is shown in the figure below.
Innovation Features:
- For the first time worldwide, development of an RoV customized to assist in underwater archaeological field research, within the context of either an excavation or a survey test case scenario, with Maximum Operating Depth down to 120 meters.
- Two robotic arms -one of which with a tactile sensor- and three joints (three degrees of freedom).
- Ability to carry floodlight with adjustable lightness and flashing lights with professional definition, for the optimal lighting angle and to avoid the scattered effect when taking photos and videos.
- Designed to carry a water jet on one robotic arm to remove material/sediment/sand off the artifacts.
- Possibility of photographic documentation of archaeological finds with north and scale with simultaneous 3D export model of the finding.
- Development of an algorithm for detecting scattered isolated artifacts, i.e. a preliminary identification and visual classification of the finds based on their shapes (indicative types of amphorae and anchors).
- Interaction and communication between the operator of the ROV and the scuba diver.
- Development of isotopic technology for material identification analysis, after the artifacts have been raised to the surface